Team Impulse team sponsored by PCB Train win event in London
PCB Train recently sponsored Team Impulse, a team of students from St Paul’s School, London in the UK CanSats competition in which competitors are challenged to design and build a mini satellite within the shape and size of a soft drinks can. We were thrilled to hear that Team Impulse came first in the UK competition and will now be representing the UK in the European final later this year in Lisbon. We asked team leader William Eustace to provide us with a write-up about the UK CanSat competition, so read on to find out about their experience taking part in this fascinating competition.
CanSats in Europe is a project run by the European Space Agency (ESA) in which teams of year 11-13 students across Europe are challenged to build a simulation of a satellite mission in the shape and size of a soft drinks can; the cans are launched from an altitude between 200 and 1000 metres by balloon or rocket and must gather data and transmit it to the ground as they drift down individually under parachutes. Projects range from the relatively simple (temperature and pressure logging combined with recording acceleration, for instance) to the extraordinarily complex (notably a can which, after launch, unfolded to become a quadcopter). In several nations, including the UK, there is a national competition and only the winners of this proceed to the European final, which, this year is being held in Lisbon.
Team Impulse delegation at UK CanSat competition. From the left: Hugo Cheema-Grubb (Twitter:@HugoCheemaGrubb)—Director of Outreach; William Eustace (Twitter: @WilliamEustace)—Team Leader/Electronics; Yuki de Pourbaix—Director of Mechanical Design.
Team Impulse is a group of students from St Paul’s School, London, which entered the UK competition. In autumn 2014, the team approached PCB Train and requested sponsorship in the form of free printed circuit boards. Several team members had used the service before and had been pleased with the results. The boards received, to a design produced by the team (and available freely on GitHub) were of excellent quality and produced rapidly. The electronics were a major part of the mission chosen, which certainly tends towards the complex end of the spectrum, to build a CanSat which, after landing, becomes a rover and is able to move over the ground to gather data from different points. The proposition, made at the end of the summer term in 2014, seemed simple—perhaps a result of the post-exam haze!
In reality, numerous problems had to be overcome. It was determined that, if the CanSat were to fall normally, its parachute would stop it moving properly over the ground; therefore it is necessary to release the parachute after landing. The design settled on was to have a wheel at each end of the can. The issue was that it would not be able to apply enough torque to overcome even small inclines or obstacles, so the team added a strut, which was locked in place by a specially cut groove in one wheel and deployed by a spring. Despite the team being assembled of students experienced in the workshop and in engineering projects, there was a steep learning curve for all involved.
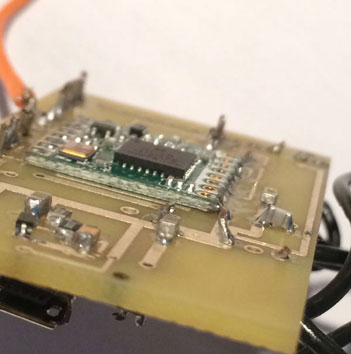 The radio module and monopole antenna (without antenna ground plane) on the underside of the PCB.
The radio module and monopole antenna (without antenna ground plane) on the underside of the PCB.
The electronics for the project were designed to be relatively simple however in practice the challenge was fitting them into the space available. Since the route processing and other on-chip tasks required a significant quantity of memory and a reasonable clock speed, the team elected to use an ARM processor rather than the AVR chips which are more common at the competition. Rather than attempt to produce a sound design for a processor so much more complicated than the average board, the team used a Teensy 3.1, which is a very small breakout for a Freescale Cortex M0 based processor that is easily mounted to the main board using headers.
Perhaps the most unusual part of the electronics was the RF part, used for communication with the ground station software. Although a radio module is issued by the ESA, size forced a different option and, in the end, Semtech Inc’s LoRa modulation was chosen on a Hope RF RFM98W, which is a 16x16mm surface-mountable module readily available in the UK. The range delivered by the unit proved to be excellent. Transmitting at 10mW (the unlicensed 434MHz power limit) the SNR in free space tests showed no deterioration at a range of 1.5km using a Yagi antenna at one end and a 1/4 wavelength monopole at the other. The link is tolerant of very low SNR (with sufficiently low bitrate, as low as -20dB). The radio link relayed back temperature (internal and external), pressure, humidity, GPS location, the compass course from the can, and served as the command mechanism, allowing commands to be issued to the CanSat from the ground.
The UK competition arrived after three lengthy reports and a lot of late nights. Three members of the team, a second St Paul’s CanSat team in the beginners’ category and two members of staff left King’s Cross on a terrifyingly early train to York, where the UK competition was to be held. Having arrived at York University’s National STEM Centre, where the competition was based, the final preparations began. The next day, the launch took place at RAF Elvington, a disused military airfield a few miles away, and the home of the fascinating Yorkshire Air Museum.
Team Impulse suffered a rather serious problem during the launch. The parachute, despite having performed well in testing, failed to open properly—perhaps it had not been folded correctly, or perhaps the launch from a tube was different to previous testing. One way or the other, the result was an impact velocity of almost twice that expected, which caused one of the motor mountings to shear off completely.
Things seemed bleak. The CanSat was not able to move since one of the wheels had become detached! Nonetheless, all the other expected data was retrieved, although the CanSat had lost the GPS fix. The launch was, therefore, successful on four out of seven secondary mission criteria. The data was good and remote command of the CanSat was demonstrated. Overall, it wasn’t such a serious failure as had been feared. The judges were impressed in particular by the quality of the team’s reports and by the extensive software and electronics development produced. The team was also able to show the rover working (having worked through the night to repair it) during their presentation! Perhaps the most important thing though, was the explanation offered for each failing. Understanding these issues is the first step to fixing them.
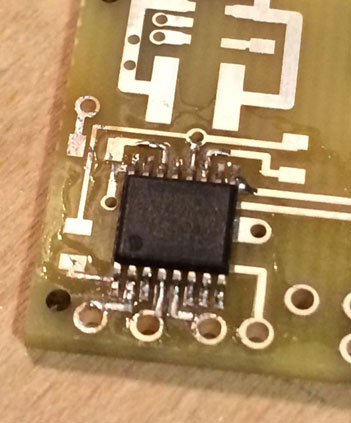 Soldering 0.3mm pin spacing packages such as this by hand requires high-quality PCBs.
Soldering 0.3mm pin spacing packages such as this by hand requires high-quality PCBs.
As a result of their efforts, Team Impulse won both the Advanced Category and the competition overall. Team Impulse is now representing the UK in the European CanSat competition, at which it has made the addition of a downwards pointing infra-red camera to map the ground below. An advanced program has been written (and is currently being improved) to align the images taken by the camera (which will be transmitted back via radio and stored on a local I2C EEPROM) to grid squares with corners of known longitude and latitude on the ground. PCB Train continues to be supportive of the campaign and have provided a final revision of boards for the team. High-quality PCBs are vital to the mission and have been guaranteed throughout. It is also wonderful to have boards which are manufactured in Britain, with reduced lead time and high quality thus assured. The team would also like to thank Melexis NV, who have generously agreed to provide the infra-red camera.
To find out more about the team, please visit the team website at teamimpul.se. Team Impulse is also on Twitter @TeamImpulseSPS and on GitHub at https://github.com/team-impulse. The electronics design and the majority of the code is already available, and after the competition some final parts of the code will be tidied up and made available for public use. A library has been written to control the Hope RF RFM98W however this is not yet ready for public release. Article written by William Eustace (@WilliamEustace on Twitter; weustace on GitHub).
Philip King
Latest posts by Philip King (see all)
- 11 Inspirational Electronics TED Talks - 26th June 2015
- Team Impulse Win UK CanSat - 1st June 2015
- What is Graphene and What Will it Bring to the World of Electronics? - 19th May 2015



Leave a Reply